































종합 우승자: 네덜란드 Wageningen University의 Bullseye 팀; 선구적인 개념의 자유형 작업; 현장 시뮬레이션은 학습 이점이 큰 도전 과제임을 입증합니다. 500일 동안 XNUMX명 이상의 해외 시청자 온라인
(DLG) DLG Feldtage와 협력하여 올해 처음으로 DLG의 디지털 플랫폼에서 가상 형식으로 개최, 국제 학생 팀을 위한 필드 로봇 대회인 제18회 국제 필드 로봇 이벤트(Field Robot Event)가 주최측인 Hohenheim University와 Wageningen University에서 수상자를 발표했습니다. 2021년 이벤트의 전체 우승자는 네덜란드 Wageningen University의 Bullseye 팀으로, 곡식 옥수수 줄, 식물이 있거나 없는 직선 줄 탐색, 잡초 및 쓰레기 인식을 포함하는 XNUMX가지 세트 현장 작업에서 수행한 성과로 평가되었습니다. 그리고 곶으로의 후속 제거. 학생 팀이 스스로 선택한 농업 과제를 해결하는 엔지니어링 능력을 과시할 수 있는 선택적 이벤트인 자유형 이벤트는 호박을 감지하고 따는 수확 로봇으로 뮌스터 응용 과학 대학의 Ceres 팀이 우승했습니다. .
518명의 해외 시청자가 시청합니다.
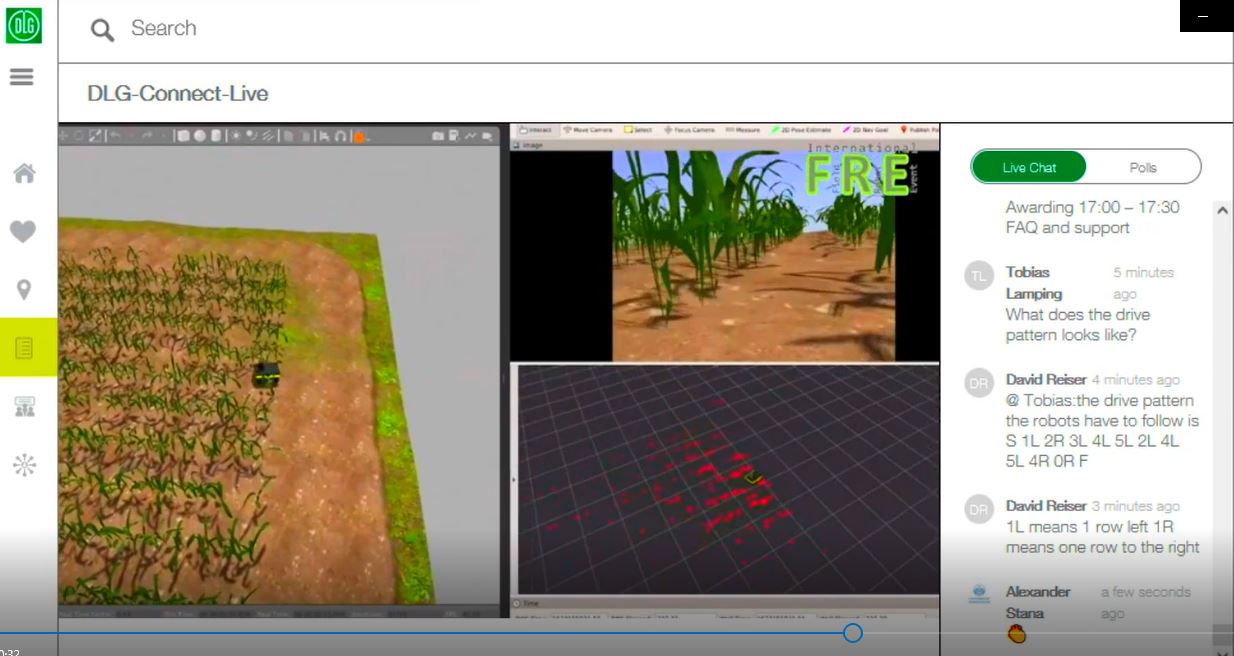
이 행사는 기술 및 학술 전문가, 엔지니어, 대학 직원 및 학생뿐만 아니라 다양한 국가의 농부로 구성된 전 세계에서 518명의 관객을 모았습니다. 제품 관리자와 같은 업계 참가자도 국제 저널리스트가 취재한 라이브 이벤트에 참석하여 NASA가 우주 탐사에 사용하는 것과 유사한 사실적인 시뮬레이션 환경에서 로봇이 수행하는 것을 시청했습니다. 시청자들은 라이브 채팅을 통해 덴마크, 독일, 네덜란드, 루마니아, 슬로베니아의 14개 국제 팀과 전문가 및 기타 시청자와 교류할 수 있는 기회를 가졌습니다.
가상옥수수밭 개발 협력상
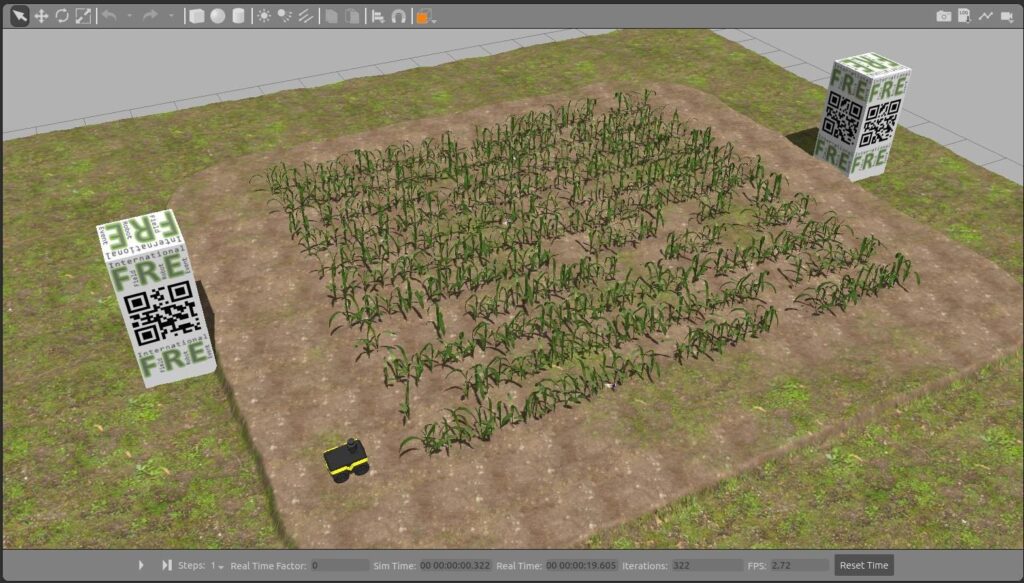
명예 협력상은 칼스루에 공과대학(KIT)의 혁신적인 현장 로봇을 위한 학생 엔지니어링 팀인 Kamaro Engineering에 수여되었습니다. 협업 상은 시뮬레이션된 환경에서 가상 옥수수 밭의 개발에 대한 공헌을 인정합니다. 이 작업에는 옥수수와 기타 구성 요소가 어떻게 생겼는지 정확하게 설명하는 코드를 작성하고 바람과 그림자와 같은 실제 효과를 만들어 다양한 농경지 시나리오, 특히 잡초 인식 및 장애물 감지를 구현하는 작업이 포함되었습니다.
학령기 재능의 두 팀
올해 Carbonite와 Camper Robotic의 두 팀은 각각 독일 도시 함부르크와 위벌링겐에서 온 기술적 재능을 지닌 학령기 어린이들로 구성되었습니다. Camper Robotic 팀은 Field Balancer라는 독특한 "Segway" 유형의 로봇을 개발했습니다. Carbonite 팀은 여러 작업에서 탁월하여 전체 XNUMX위에 올랐습니다.
“이 가상 이벤트는 초연이었고 우리는 결과와 학생들의 피드백에 매우 만족했습니다. 시뮬레이션 환경은 필드 로봇 개발 작업의 큰 부분입니다. 시뮬레이션된 환경에서 실시간으로 진행되는 이 이벤트는 시스템의 능력을 확립할 뿐만 아니라 다른 팀과 벤치마킹할 수 있는 훌륭하고 도전적인 운동이라고 생각합니다. 이것은 앞으로 몇 달 동안 상당한 학습 이점을 가질 것입니다.”라고 독일 Hohenheim 대학의 작물 생산 기술 부문 이사인 Hans W. Griepentrog 교수가 말했습니다.
“이 이벤트를 위해 특별히 만든 ROS Gazebo 시뮬레이션 환경은 학생 팀에게 유용했기 때문에 학생들이 해당 플랫폼에서 미래의 현장 로봇 시뮬레이션을 테스트할 수 있도록 대회 후에도 계속 사용할 수 있도록 하기로 결정했습니다. "라고 Griepentrog 교수는 결론지었습니다.
자유형 이벤트 - 미래 개념
이벤트 내의 자유형 작업은 항상 관중의 하이라이트이며 팀이 자체적으로 선택하고 개발한 현장 응용 프로그램에 대한 비전 개념을 통해 미래에 대한 창을 제공합니다. 경연의 선택적인 범주인 작업은 학생 팀이 선택한 실제 현장 작업에 대한 솔루션을 개발하는 기술을 보여줄 기회를 제공했습니다. 올해 행사에서는 학생들이 자유형 과제를 비디오로 제시했습니다. 자유형 작업에는 자유형 부문에서 우승한 Ceres의 수확 로봇이 포함되었습니다. 마리보르 대학의 FarmBeast 팀이 개발한 두 번째 제품은 잡초를 인식할 수 있는 살포 도구와 필요한 곳에만 표적 살포를 하여 토양 보호에 기여했습니다. XNUMX위는 Beteigeuze 현장 로봇을 보유한 Kamaro 팀으로, 트레일러 기반 기구를 비롯한 여러 부착물이 있는 모듈식 자체 구성 현장 로봇으로 자처했습니다.
국제 현장 로봇 대회는 다양한 현장 업무를 아우르는 국제 현장 로봇 대회입니다. 구부러진 작물 사이에서 로봇을 탐색하고 잡초이거나 단순히 쓰레기인 물체를 인식하고 지리 참조를 사용하여 물체를 매핑하는 것은 센서와 알고리즘을 사용하여 현장 로봇이 해결하는 과제의 일부입니다. 카메라를 사용하여 잡초가 무엇인지 결정하는 것과 같이 실시간으로 정보를 해석하는 것은 복잡하고 수개월의 사전 개발 작업이 필요합니다. 추가 작업은 도구를 작동하는 액추에이터의 정확한 소프트웨어 제어가 필요한 잡초와 쓰레기를 제거해야 했습니다. 과제는 로봇이 주어진 정보를 해석하고 최적의 결정을 내리는 당일 데이터를 지능적으로 이해하는 것입니다. 복잡성, 성능 및 농업적 유용성이 주요 심사 기준이었습니다.
콘테스트 영상 제공
모든 시뮬레이션된 현장 작업, 심사 위원의 해설 및 자유형 작업을 위해 팀이 제출한 비디오를 포함하는 XNUMX일 현장 로봇 이벤트의 주문형 비디오는 각 이벤트 날짜에 대한 별도의 링크로 DLG의 온라인 플랫폼에서 사용할 수 있습니다.
8월 XNUMX일: 곡선 행이 있는 옥수수 밭에서 탐색; 누락된 식물이 있는 직선 행. (링크)
9월 XNUMX일: 잡초 및 물체 감지 및 지리 참조; 곶으로 제거. (링크)
10월 XNUMX일: 자유형 이벤트. (링크)
XNUMX개 부문 각각의 우승자와 점수에 대한 자세한 내용은 에서 확인할 수 있습니다. https://www.fieldrobot.com/event/
국제 현장 로봇 행사는 대규모 디지털 농업 행사의 본거지이기도 한 DLG의 디지털 플랫폼에서 개최되었습니다. 플랫폼은 사용자에게 제품 콘텐츠와 개인, 그룹 또는 공개 상호 작용을 모두 제공하는 연결 플랫폼입니다.
2003년부터 실용 필드 로봇 연구
네덜란드의 Wageningen University에서 2003년에 시작한 현장 로봇 대회는 선구적인 로봇 공학 및 정밀 농업 기술을 실제 조건에서 테스트하고 젊은 과학자들이 동료와 함께 아이디어를 교환하고 개발할 수 있는 기회를 제공합니다. 필드 이벤트와 마찬가지로 가상 이벤트의 참가자는 서로 상호 작용하고 국제 시청자와 상호 작용할 수 있는 기회를 가졌습니다. 이 상호 작용은 이벤트의 중요한 부분이며 개념을 발전시키는 데 도움이 되었습니다.
2021년부터 DLG-Feldtage 전시회에서 개최된 2014 Field Robot Event는 로봇과 그 발명가를 위한 까다로운 가상 테스트는 물론 가상 시청자에게 흥미진진한 엔터테인먼트를 제공했습니다.]

{kind=link}